AIコーディングエージェントはもう当たり前。今度は同じエージェントが工場のロボットを訓練し、自動運転のシナリオを生成し、半導体ラインの不良を検出しています。
NVIDIAがPhysical AIエージェントスキル集をオープンソースで公開しました。Foxconn・Pegatron・Delta Electronicsはすでに実戦投入して数値を出しています。
フィジカルAIって何?
これまでAIエージェントの主な活躍の場は、テキスト・コード・画像でした。フィジカルAIはその次のステップです — デジタル画面を飛び出し、ロボット・工場・自動車といった物理的な世界を理解・制御するAIのことです。
物理世界のAI訓練が難しいのは、データ収集が大変だからです。ロボットに特定の動作を教えるには何十万回ものシミュレーションデータが必要ですが、現場で集めるのは遅くてコストがかかります。半導体ラインで滅多に発生しない不良品の画像を何千枚も集めるのは、現実的にほぼ不可能です。
NVIDIAのアプローチは、このボトルネックをAI自身で解決することです。本物のデータが不足していればAIが合成して補い、シミュレーションで十分に訓練してから実際の現場に展開する。そのパイプライン全体をエージェントが自動で回す仕組みを作ったのです。
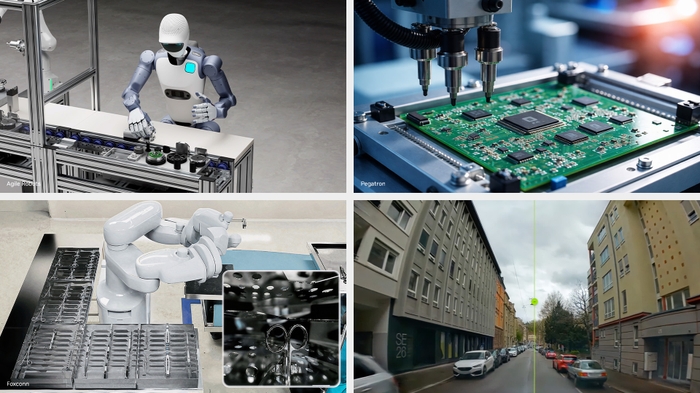
工場ではすでに使われていた
今回の発表が注目されるのは、ロードマップではなく実績数値が出ているからです。FoxconnやPegatronを含む台湾の電子製造大手が、すでに結果を出しています。
Defect Image Generationスキルがこれらの数値を生んだ鍵です。実際の不良品画像が不足している場合、AIが合成不良画像を生成して訓練データを補強します。Pegatronはこのスキルだけで67%の時間削減を達成しました。
自動運転分野では、Li Auto・Afari・DeepRoute.aiが1日1,000件以上のシーン再構成と30万件のシミュレーションを処理しています。
公開されたスキルは?
GitHubとskills.shを通じて公開されたスキルは4つの分野をカバーします。
| 分野 | 主なスキル・ツール | 代表的な活用事例 |
|---|---|---|
| 製造・ビジョンAI | Defect Image Generation, Video Augmentation, Metropolis VSS | Pegatron 67%短縮、Delta 17%向上 |
| ロボット | Isaac Sim 6.0, Isaac Lab, COMPASS, Cosmos-H-Surgical-Simulator | RL自動化、手術ロボット訓練 |
| 自動運転 | Neural Reconstruction, OmniDreams, AlpaGym, Alpamayo 2 Super | Li Auto 1日30万シミュレーション |
| 産業・医療 | Omniverse Digital Twin, Healthcare Simulator, MEGA Blueprint | デジタルツイン、病院環境シミュレーション |
基盤となるモデルはCosmos 3です。Hugging Faceでの累計ダウンロード数は200万回を超え、Physical AIデータセットは1,500万ダウンロードを記録しています。
セキュリティはどうなっていますか?
NemoClaw BlueprintとOpenShellランタイムがポリシーベースのガバナンスを提供します。エージェントがどのツールを実行できるかを制御でき、ローカルとクラウド環境どちらでも安全に運用できます。
実際に始める方法
NVIDIA BrevではH100 GPUの無料クレジットが利用でき、環境なしですぐに実習できます。
- GitHubでスキルリポジトリを確認
github.com/NVIDIA/skills で目的の分野のスキルを選択します。 - NVIDIA Brevで無料環境を起動
Physical AI Launchablesから環境を選ぶと、H100 GPU付きのJupyter環境が数分で利用可能になります。 - コーディングエージェントにスキルを接続
skills.sh形式のスキルはClaude Code、CursorなどにMCP方式で接続できます。 - 合成データ生成→訓練→検証
Defect Image Generationでデータを作成し、Isaac Sim 6.0でシミュレーション、Isaac Labで訓練を自動化します。 - Jetsonエッジデバイスへのデプロイ
Jetsonプラットフォーム最適化スキルでエッジデバイスへのデプロイも自動化できます。