AI编程智能体已经不新鲜了。现在同样的智能体正在训练工厂机器人、生成自动驾驶场景、检测半导体生产线上的缺陷。
NVIDIA将Physical AI智能体技能集开源发布,Foxconn、Pegatron、Delta Electronics已经在实际生产中部署并取得了成果。
什么是物理AI?
过去,AI智能体的主要阵地是文字、代码和图像——ChatGPT写邮件,Claude Code写代码。物理AI是下一个阶段:跨越数字屏幕,理解并控制机器人、工厂、汽车等物理世界的AI。
难点在于训练物理AI极其困难。教一个机器人完成特定动作需要数十万次仿真数据,而从真实环境中收集这些数据既慢又贵。在半导体生产线上收集几千张罕见缺陷图像,几乎是不可能完成的任务。
NVIDIA的解决方案是用AI来解决这个瓶颈:真实数据不足时,AI来生成合成数据;在仿真中充分训练后,再部署到实际现场。整个流程——数据生成、仿真、训练、部署——现在全部由智能体自动运行。
工厂里已经在用了
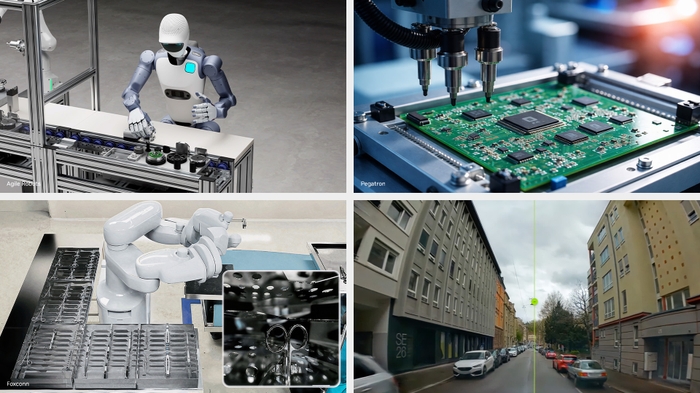
这次发布之所以引人注目,是因为拿出了实战数据,而不只是路线图。包括Foxconn和Pegatron在内的台湾电子制造商已经完成部署并取得了结果。
这些成果的核心是Defect Image Generation技能。当真实缺陷图像不足时,AI生成合成缺陷图像来补充训练数据。Pegatron仅靠这一个技能,就将AI模型训练与部署时间缩短了67%。
自动驾驶领域的规模更大。Li Auto、Afari和DeepRoute.ai每天运行1,000多次场景重建和30万次渲染与仿真。在真实道路上一天拍摄30万种场景是不可能的,但用智能体技能就可以实现。
开放了哪些技能?
这次通过GitHub和skills.sh开放的技能覆盖四个领域,可与任何编程智能体配合使用。
| 领域 | 主要技能与工具 | 代表应用案例 |
|---|---|---|
| 制造与视觉AI | Defect Image Generation, Video Augmentation, Metropolis VSS Blueprint | Pegatron缩短67%,Delta检测率+17% |
| 机器人 | Isaac Sim 6.0, Isaac Lab, COMPASS导航, Cosmos-H-Surgical-Simulator | 强化学习自动化,手术机器人训练数据生成 |
| 自动驾驶 | Neural Reconstruction, OmniDreams, AlpaGym, Alpamayo 2 Super (32B VLA) | Li Auto每日30万次仿真 |
| 工业与医疗 | Omniverse Digital Twin, Healthcare Simulator, MEGA Blueprint | Siemens·Cadence数字孪生,医院环境仿真 |
底层模型是Cosmos 3——将视觉推理、世界预测和动作生成集于一体的全能模型,在Hugging Face上累计下载量超过200万次,Physical AI数据集下载量达1,500万次。
安全性如何保障?
NemoClaw Blueprint和OpenShell运行时提供基于策略的治理。可以用策略控制智能体能执行哪些工具,在本地和云端环境中都能安全运行。
如何开始
NVIDIA Brev平台提供H100 GPU免费积分,无需自己搭建环境即可直接上手。按照以下5个步骤,即可运行你的第一个Physical AI智能体技能。
- 在GitHub查看技能仓库
访问github.com/NVIDIA/skills,选择适合你领域的技能。制造与视觉AI选vision-ai文件夹,机器人选robotics文件夹。 - 在NVIDIA Brev启动免费环境
在Physical AI Launchables中选择适合你领域的预配置环境,配备H100 GPU的Jupyter环境几分钟内就能就绪。 - 将技能接入编程智能体
以skills.sh格式打包的技能可以通过MCP方式直接接入Claude Code、Cursor等编程智能体。 - 生成合成数据→训练→验证
用Defect Image Generation技能创建数据,用Isaac Sim 6.0做仿真,Isaac Lab自动化训练——全部由智能体按顺序处理。 - 部署到Jetson边缘设备
训练完成后,用Jetson平台优化技能自动化边缘设备部署。云端训练→现场推理的完整循环由一条智能体流水线搞定。